This work was presented at the recent IEEE/CVF Computer Vision and Pattern Recognition 2022 conference in New Orleans.
Abstract: Gated cameras hold promise as an alternative to scanning LiDAR sensors with high-resolution 3D depth that is robust to back-scatter in fog, snow, and rain. Instead of sequentially scanning a scene and directly recording depth via the photon time-of-flight, as in pulsed LiDAR sensors, gated imagers encode depth in the relative intensity of a handful of gated slices, captured at megapixel resolution. Although existing methods have shown that it is possible to decode high-resolution depth from such measurements, these methods require synchronized and calibrated LiDAR to supervise the gated depth decoder – prohibiting fast adoption across geographies, training on large unpaired datasets, and exploring alternative applications outside of automotive use cases. In this work, propose an entirely self-supervised depth estimation method that uses gated intensity profiles and temporal consistency as a training signal. The proposed model is trained end-to-end from gated video sequences, does not require LiDAR or RGB data, and learns to estimate absolute depth values. We take gated slices as input and disentangle the estimation of the scene albedo, depth, and ambient light, which are then used to learn to reconstruct the input slices through a cyclic loss. We rely on temporal consistency between a given frame and neighboring gated slices to estimate depth in regions with shadows and reflections. We experimentally validate that the proposed approach outperforms existing supervised and self-supervised depth estimation methods based on monocular RGB and stereo images, as well as supervised methods based on gated images. Code is available at https://github.com/princeton-computationalimaging/Gated2Gated.
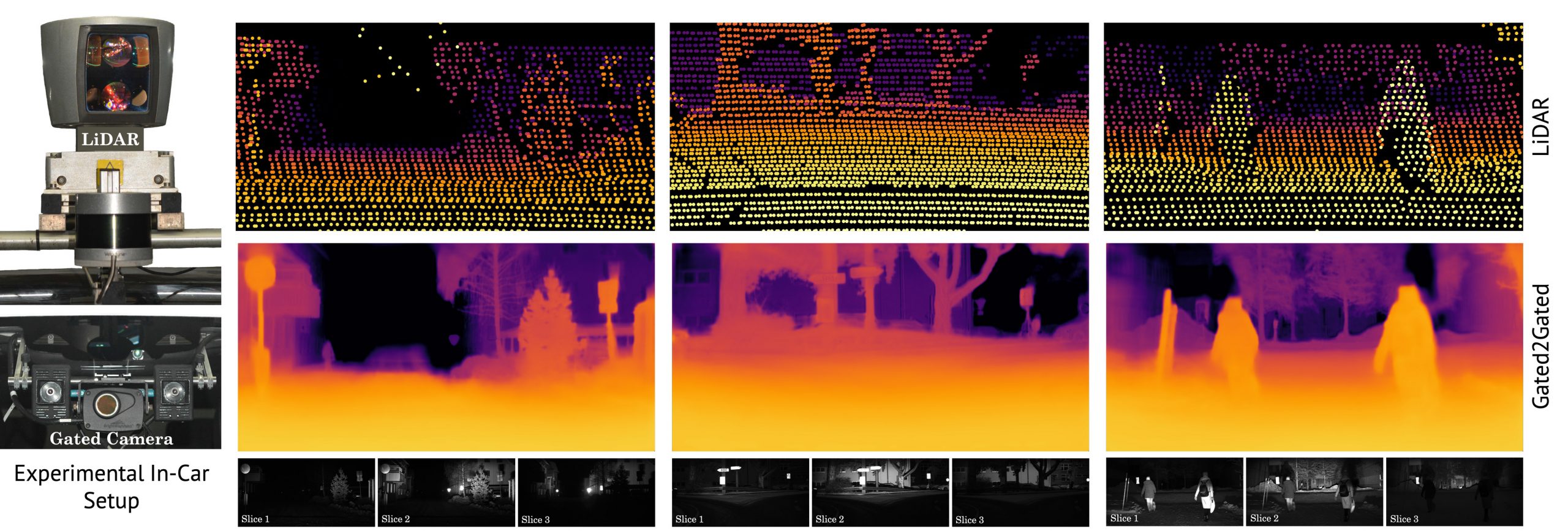
An example gated imaging system is pictured in the bottom left and consists of a synchronized camera and a not shown VECSL flash illumination source. The system allows to integrate the scene response for narrow depth ranges as illustrated in the bottom row. Therefore, the overlapping gated slices contain implicit depth information according to the time-of-flight principle at image resolution. In comparison the illustrated LiDAR sensors in the top left send out point wise illumination pulses causing a sparse depth representation depicted in the top row. Our proposed self-supervised Gated2Gated learning technique recovers this dense depth information (middle row) from the shown set of three gated images, by learning from temporal and gated illumination cues.
The paper shows results in a variety of challenging driving conditions such as nighttime, fog, rain and snow.
A. Walia et al., "Gated2Gated: Self-Supervised Depth Estimation from Gated Images", CVPR 2022.
More information: https://light.princeton.edu/publication/gated2gated/
No comments:
Post a Comment
All comments are moderated to avoid spam and personal attacks.