In a recent open access Nature article titled "Low-latency automotive vision with event cameras", Daniel Gehrig and Davide Scaramuzza write:
The computer vision algorithms used currently in advanced driver assistance systems rely on image-based RGB cameras, leading to a critical bandwidth–latency trade-off for delivering safe driving experiences. To address this, event cameras have emerged as alternative vision sensors. Event cameras measure the changes in intensity asynchronously, offering high temporal resolution and sparsity, markedly reducing bandwidth and latency requirements. Despite these advantages, event-camera-based algorithms are either highly efficient but lag behind image-based ones in terms of accuracy or sacrifice the sparsity and efficiency of events to achieve comparable results. To overcome this, here we propose a hybrid event- and frame-based object detector that preserves the advantages of each modality and thus does not suffer from this trade-off. Our method exploits the high temporal resolution and sparsity of events and the rich but low temporal resolution information in standard images to generate efficient, high-rate object detections, reducing perceptual and computational latency. We show that the use of a 20 frames per second (fps) RGB camera plus an event camera can achieve the same latency as a 5,000-fps camera with the bandwidth of a 45-fps camera without compromising accuracy. Our approach paves the way for efficient and robust perception in edge-case scenarios by uncovering the potential of event cameras.
Also covered in an ArsTechnica article: New camera design can ID threats faster, using less memory https://arstechnica.com/science/2024/06/new-camera-design-can-id-threats-faster-using-less-memory/
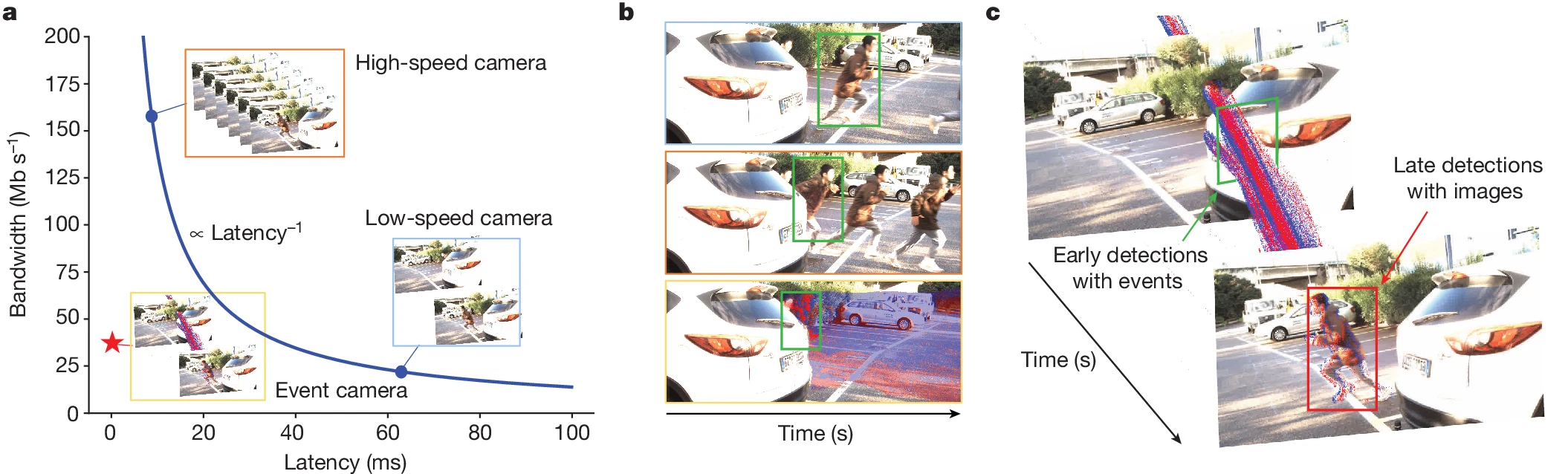
a, Unlike frame-based sensors, event cameras do not suffer from the bandwidth–latency trade-off: high-speed cameras (top left) capture low-latency but high-bandwidth data, whereas low-speed cameras (bottom right) capture low-bandwidth but high-latency data. Instead, our 20 fps camera plus event camera hybrid setup (bottom left, red and blue dots in the yellow rectangle indicate event camera measurements) can capture low-latency and low-bandwidth data. This is equivalent in latency to a 5,000-fps camera and in bandwidth to a 45-fps camera. b, Application scenario. We leverage this setup for low-latency, low-bandwidth traffic participant detection (bottom row, green rectangles are detections) that enhances the safety of downstream systems compared with standard cameras (top and middle rows). c, 3D visualization of detections. To do so, our method uses events (red and blue dots) in the blind time between images to detect objects (green rectangle), before they become visible in the next image (red rectangle).
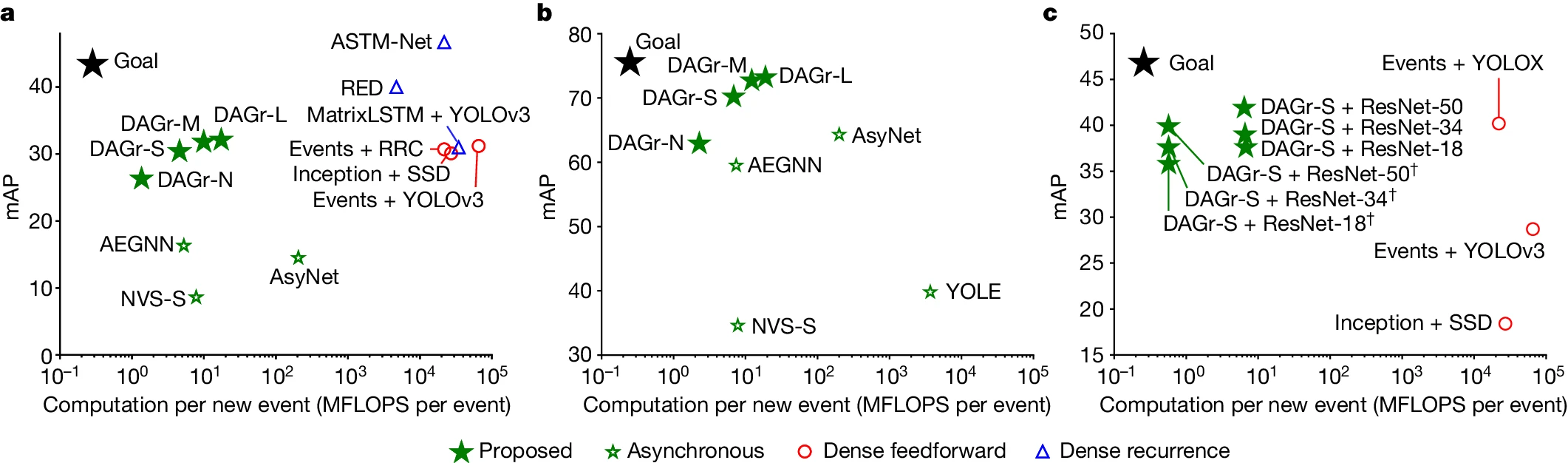
a,b, Comparison of asynchronous, dense feedforward and dense recurrent methods, in terms of task performance (mAP) and computational complexity (MFLOPS per inserted event) on the purely event-based Gen1 detection dataset41 (a) and N-Caltech101 (ref. 42) (b). c, Results of DSEC-Detection. All methods on this benchmark use images and events and are tasked to predict labels 50 ms after the first image, using events. Methods with dagger symbol use directed voxel grid pooling. For a full table of results, see Extended Data Table 1.
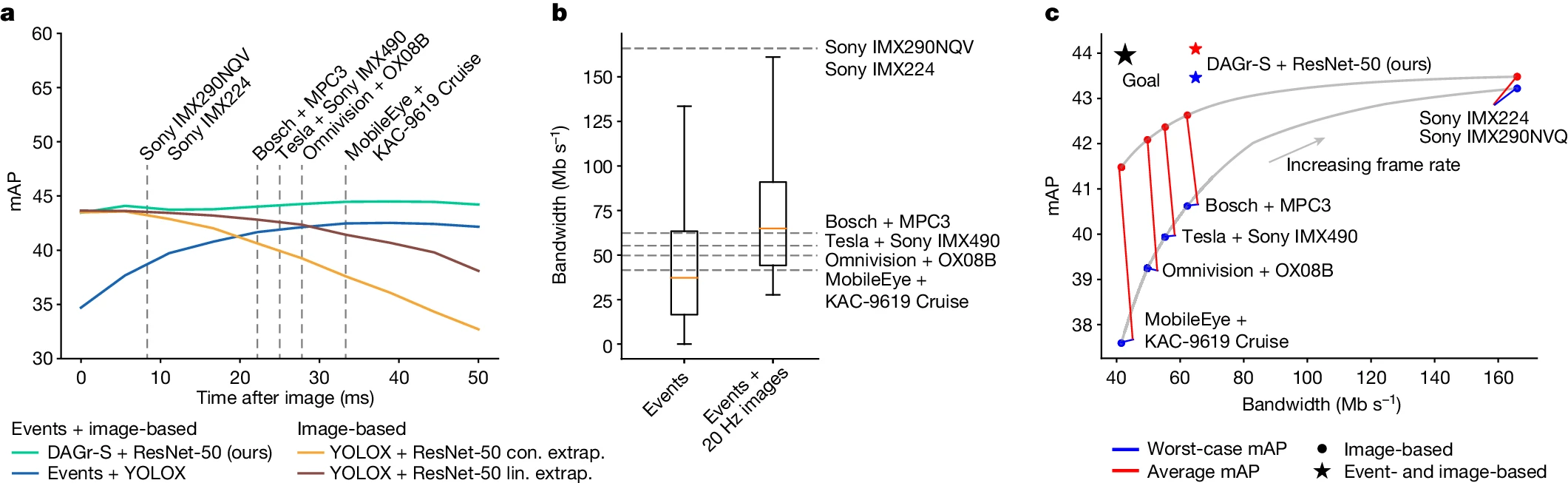
a, Detection performance in terms of mAP for our method (cyan), baseline method Events + YOLOX (ref. 34) (blue) and image-based method YOLOX (ref. 34) with constant and linear extrapolation (yellow and brown). Grey lines correspond to inter-frame intervals of automotive cameras. b, Bandwidth requirements of these cameras, and our hybrid event + image camera setup. The red lines correspond to the median, and the box contains data between the first and third quartiles. The distance from the box edges to the whiskers measures 1.5 times the interquartile range. c, Bandwidth and performance comparison. For each frame rate (and resulting bandwidth), the worst-case (blue) and average (red) mAP is plotted. For frame-based methods, these lie on the grey line. The performance using the hybrid event + image camera setup is plotted as a red star (mean) and blue star (worst case). The black star points in the direction of the ideal performance–bandwidth trade-off.

Looks like they're using the Prophesee event cameras?
ReplyDeleteThey are, it is mentioned in the paper.
Delete