Lukashchuk et al. recently published a paper titled "Photonic-electronic integrated circuit-based coherent LiDAR engine" in the journal Nature Communications.
Open access link: https://www.nature.com/articles/s41467-024-47478-z
Abstract: Chip-scale integration is a key enabler for the deployment of photonic technologies. Coherent laser ranging or FMCW LiDAR, a perception technology that benefits from instantaneous velocity and distance detection, eye-safe operation, long-range, and immunity to interference. However, wafer-scale integration of these systems has been challenged by stringent requirements on laser coherence, frequency agility, and the necessity for optical amplifiers. Here, we demonstrate a photonic-electronic LiDAR source composed of a micro-electronic-based high-voltage arbitrary waveform generator, a hybrid photonic circuit-based tunable Vernier laser with piezoelectric actuators, and an erbium-doped waveguide amplifier. Importantly, all systems are realized in a wafer-scale manufacturing-compatible process comprising III-V semiconductors, silicon nitride photonic integrated circuits, and 130-nm SiGe bipolar complementary metal-oxide-semiconductor (CMOS) technology. We conducted ranging experiments at a 10-meter distance with a precision level of 10 cm and a 50 kHz acquisition rate. The laser source is turnkey and linearization-free, and it can be seamlessly integrated with existing focal plane and optical phased array LiDAR approaches.
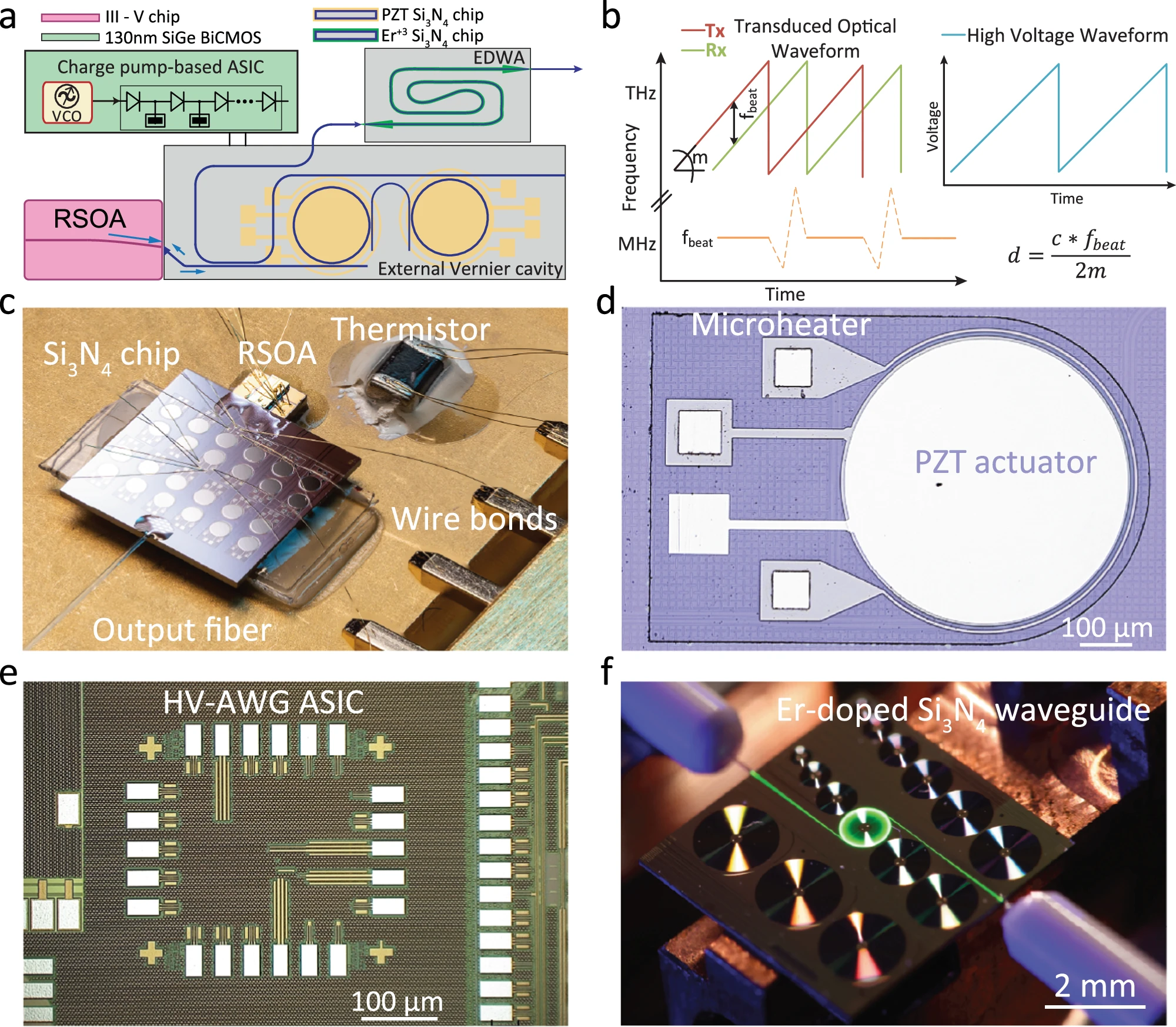
a Schematics of photonic-electronic LiDAR structure comprising a hybrid integrated laser source, charge-pump based HV-AWG ASIC, photonic integrated erbium-doped waveguide amplifier. b Coherent ranging principle. c Packaged laser source. RSOA is edge coupled to Si3N4 Vernier filter configuration waveguide, whereas the output is glued to the fiber port. PZT and microheater actuators are wirebonded as well as butterfly package thermistor. d Zoom-in view of (c) highlighting a microring with actuators. e Micrograph of the HV-AWG ASIC chip fabricated in a 130 nm SiGe BiCMOS technology. The total size of the chip is 1.17–1.07 mm2. f The Erbium-doped waveguide is optically excited by a 1480 nm pump showing green luminescence due to the transition from a higher lying energy level to the ground state.
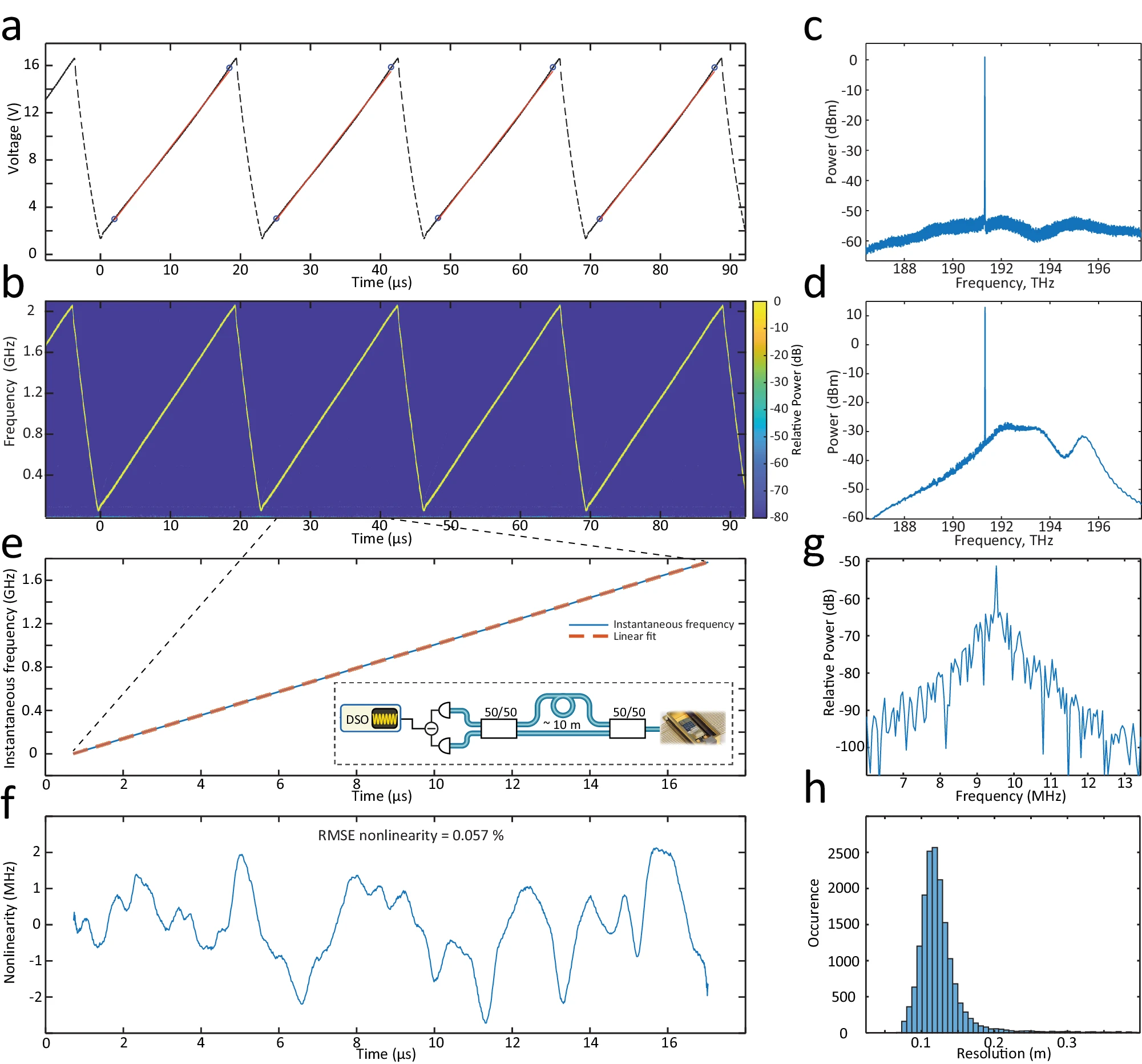
a Electrical waveform generated by the ASIC. Blue circles highlight the segment of ~ 16 μs used for ranging and linearity analysis. The red curve is a linear fit to the given segment. b Time-frequency map of the laser chirp obtained via heterodyne detection with auxiliary laser. RBW is set to 10 MHz. c Optical spectrum of Vernier laser output featuring 50 dB side mode suppression ratio. d Optical spectrum after EDWA with >20 mW optical power. e Instantaneous frequency of the optical chirp obtained via delayed homodyne measurement (inset: experimental setup). The red dashed line corresponds to the linear fit. The excursion of the chirp equates to 1.78 GHz over a 16 μs period. f Nonlinearity of the laser chirp inferred from (e). RMSE nonlinearity equates to 0.057% with the major chirp deviation from the linear fit lying in the window ± 2 MHz. g The frequency beatnote in the delayed homodyne measurement corresponds to the reference MZI delay ~10 m. The 90% fraction of the beatnote signal is taken for the Fourier transformation. h LiDAR resolution inferred from the FWHM of the MZI beatnotes over >20,000 realizations. The most probable resolution value is 11.5 cm, while the native resolution is 9.3 cm corresponding to 1.61 GHz (90% of 1.78 GHz).
No comments:
Post a Comment
All comments are moderated to avoid spam and personal attacks.