Settembrini et al from Pointcloud GmbH (Zürich, Switzerland) published a paper titled "A large-scale coherent 4D imaging sensor" in Nature magazine.
Link: https://www.nature.com/articles/s41586-026-10183-6
Abstract: Detailed and accurate 3D mapping of dynamic environments is essential for machines to interface with their surroundings and for human–machine interaction. Although considerable effort has been made to create the equivalent of the complementary metal–oxide–semiconductor (CMOS) image sensor for the 3D world, scalable, high-performance, reliable solutions have proven elusive. Focal plane array (FPA) sensors using frequency-modulated continuous-wave (FMCW) light detection and ranging (LiDAR) have shown potential to meet all of these requirements and also provide direct measurement of radial velocity as a fourth dimension. Previous demonstrations, although promising, have not achieved the simultaneous scale and performance required by commercial applications. Here we present a large-scale, coherent LiDAR FPA enabled by comprehensive chip-scale optoelectronic integration. A 4D imaging camera is built around the FPA and used to acquire point clouds. At the core is a 352 × 176-pixel 2D FMCW LiDAR FPA comprising more than 0.6 million photonic components, all integrated on-chip together with their associated electronics. This represents a five times increase in pixel count with respect to previous demonstrations. The pixel architecture combines the outbound and inbound optical paths within the pixel in a monostatic configuration, together with coherent detectors and electronics. Frequency-modulated light is directed sequentially to groups of pixels by in-plane thermo-optic switches with integrated electronics for driving and calibration. An integrated serial digital interface controls both optical switching and readout synchronously. Point clouds of objects ranging from 4 to 65 m with per-pixel integration time compatible with frame rates from 3 to 15 frames per second (fps) are shown. This result demonstrates the capabilities of FMCW LiDAR FPA sensors as enablers of ubiquitous, low-cost, compact coherent 4D imaging cameras.
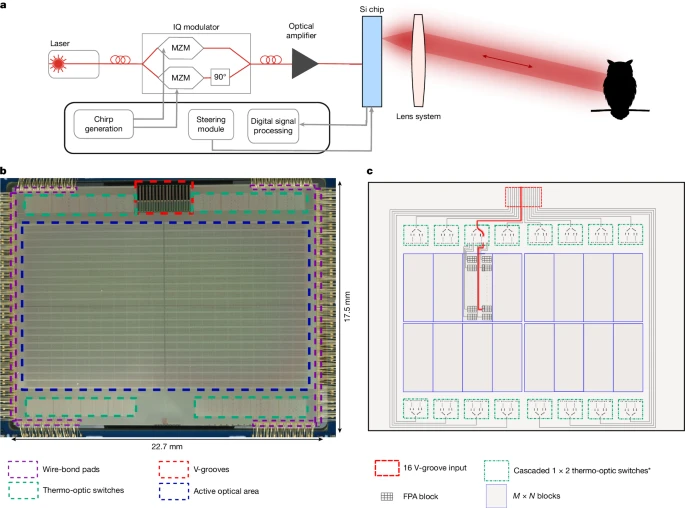
a, The architecture contains an imaging chip that simultaneously functions as both transmitter and receiver. The light path from the chip to target (owl) is determined by the optical lens system. b, Microscope image of the chip, showing the active optical area and thermo-optical switching network. c, Schematic of the light path selection process on the imaging chip. *Some of the outputs of the first-level switches are not connected.
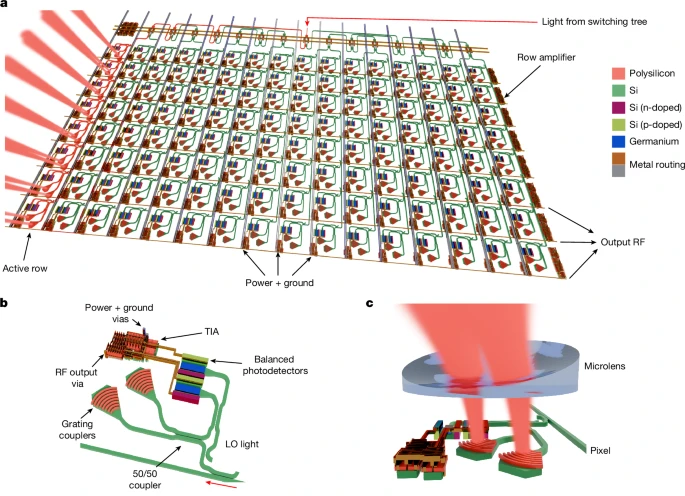
a, Schematic representation of the coherent FPA block. The modulated light is routed to a single 8-pixel row, illuminating a subsection of the scene. The in-plane rotation and emission angle of each grating coupler pair are adjusted to enhance detection efficiency. b, Schematic image of a single coherent pixel, including grating coupler pairs, balanced germanium photodetectors and an integrated TIA. c, Schematic image of a single element of the concave microlens array deposited on-chip to increase light-coupling efficiency.
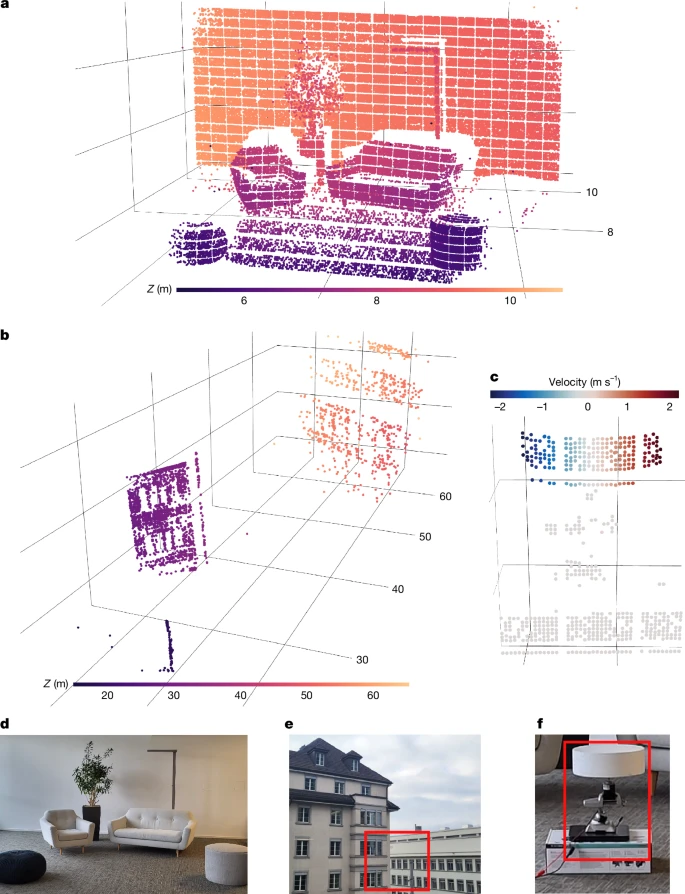
a, Point cloud of an office scene (6–11 m) obtained by a single acquisition using the entire imaging array with a f = 35 mm focal length lens. b, Point cloud from two buildings located 20–65 m away, obtained by coherently averaging four acquisitions with a f = 50 mm focal length lens. c, Velocity-annotated point cloud of the disc that is rotating about its vertical axis, obtained using a single acquisition with a f = 35 mm focal length lens. d–f, Photographs of the scenes in a–c. Red rectangles denote the regions of interest.
Yet another LiDAR company. How many do we need to see there before final consolidation. How do LiDAR companies even get funding these days?
ReplyDeleteThat is quite a ray of sunshine attitude ;-). Thank you for your positive thoughts ;-) Remus Nicolaescu
ReplyDelete